Teaching a robot to follow an edge has always been the slow part. With a teach pendant, every point along a deburring boundary or chamfer line is jogged to individually. A single complex edge can take hours. Multiply that across a batch of part variants and the robot spends more time being programmed than running.
AutoEdge takes a different approach. Import your CAD file, select the edges on the 3D model, set your process parameters, and the toolpath generates automatically. For surface finishing, grinding, sanding, and material removal applications, the path is ready in minutes instead of hours.
From CAD File to Edge Toolpath
AutoEdge starts with a STEP file. Edges are extracted directly from the original CAD geometry rather than approximated from a mesh. The difference matters: STEP-based edges preserve the mathematically exact curve definitions from your CAD system, which is the accuracy baseline that mesh-based approaches cannot match.
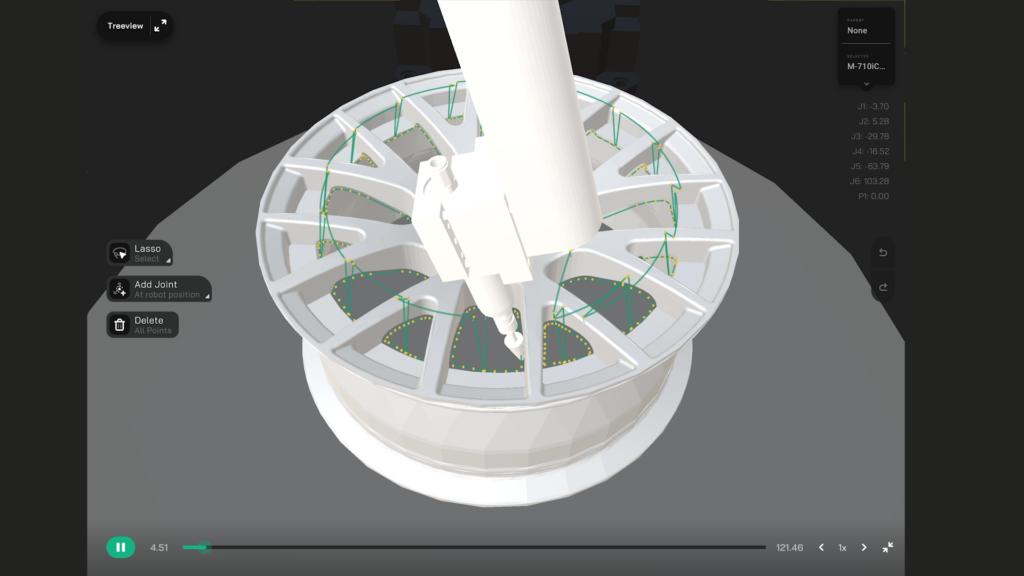
With the model loaded, the operator clicks the edges or boundaries to process. Augmentus provides native edge selection with automatic edge type detection and a waypoint count preview before you commit. Click the edge, review the count, and move on.
From there, the operator sets the process parameters: robot speed, tool standoff, tool angle, approach and retreat motions, blending radius. These are the same parameters any experienced operator already thinks in. The interface just lets them enter them directly instead of encoding them into waypoints one at a time.
The system generates the full toolpath and renders it in the 3D environment for immediate review. The gap between “part loaded” and “path ready” collapses to minutes.
Optimised, Executable Motion
Path generation produces a path. The trajectory optimiser makes it executable.
AutoEdge feeds into Augmentus’ trajectory optimiser, which solves for singularity, collision, and reachability errors to produce optimised coordinated synchronous motion. External axes (positioners, linear rails, turntables) are solved as part of this process. The optimiser doesn’t just flag problems. It resolves them, so the program that comes out is ready to run.
The full path then runs in offline simulation before deployment. Operators review coverage, verify approach and retreat clearances, and validate cycle time, all without putting the robot offline. Once validated, the program exports in the native robot language for the target brand.
Where AutoEdge Delivers
Surface finishing and deburring. For parts that need edge cleanup after machining, AutoEdge generates the path from edge selection to validated program. The operator selects the boundaries, sets the process, and the robot runs the edges. What used to take a full day of teach pendant work compresses to minutes.
Grinding and sanding. For material removal along edges and boundaries, process parameters control contact angle, speed, and tool standoff. Because every waypoint along the edge follows the same parameter set, the variation that creeps in during manual teaching is gone.
Coating and material application. For processes that follow an edge path, such as sealant application or coating along boundaries, the toolpath follows the actual geometry from CAD. Coverage is consistent across the full edge rather than dependent on operator accuracy.
Inside the Augmentus Platform
AutoEdge is one module within Augmentus. The platform supports major robot brands with paths exporting in native robot languages. No third-party post-processor required. External axes are treated as part of the workcell from the start.
For production environments where parts don’t always match the CAD model, Augmentus’ vision system scans the actual part, compares it against the reference geometry, and corrects the path to match what’s in front of the robot. Fit-up gaps, distortion, fixture variation. The path adjusts. The operator doesn’t have to.
Want to test it out? Sign up for our free trial today.